Российские ученые из МФТИ впервые научили робота по-новому ходить и прыгать
Уникальную кинематику – схему движения ног антропоморфного робота - создали в МФТИ. В отличие от предыдущих схем, она позволяет двуногой машине существенно экономить энергию при ходьбе, а также более плавно выполнять динамичные движения, такие как прыжки и приземления.
Как сообщили «МК» в пресс-службе университета, новые бионические ноги для робота придумали специалисты лаборатории волновых процессов и систем управления. Новая кинематика позволяет ему двигаться более естественно и энергоэффективно.
Антропоморфные роботы — это машины, конструкция которых воспроизводит ключевые элементы морфологии человеческого тела: две руки, две ноги, торс и голова. Они смогут в будущем заменить человека без изменений архитектуры среды: перемещать грузы на складе, работать в пункте выдачи заказов, спасать жизни при тушении пожаров, ухаживать за лежачими больными.
Обычно разработчики антропоморфных роботов стремятся имитировать биомеханику человека, последовательно располагая множество тяжелых моторов, выполняющих роль мышц, по всей ноге — от бедра до стопы. Однако такая конфигурация делает движения энергозатратными, медленными и жесткими, как если бы человек шел с гирями, прикованными к ногам.
По словам одного из разработчиков новой схемы, заведующего лабораторией Романа Горбачева, инженеры МФТИ на базе собственного программного обеспечения с применением цифрового моделирования изобрели принципиально новую конструкцию механизма ног робота. Она сочетает в себе биомеханические принципы человеческого тела с самыми передовыми технологиями.
«В основе решения лежит оригинальная кинематическая система тяг и электроприводов, позволившая перенести электродвигатели, управляющие движением ног, в их верхнюю часть, а также разделить функции сокращения ноги и маха ногой вперед-назад на независимые моторы», – говорится в описании работы
Благодаря такому переносу управляющих электродвигателей в верхнюю часть ног, специалистам удалось значительно снизить массу нижней части конечностей, что в свою очередь существенно улучшило динамику. В частности, оператору стало легче контролировать равновесие робота и позволило увеличить его маневренность.
Отдельные моторы на сокращение ноги и мах ногой позволили повысить энергоэффективность и упростить управление. Например, для выполнения движения приседа или прыжка человеку необходимо работать одновременно мышцами бедра, колена и щиколотки, а новому бионическому роботу – только мотором сокращения ноги. При этом остальные моторы, по словам разработчиков, можно временно «заморозить» и сэкономить энергию.
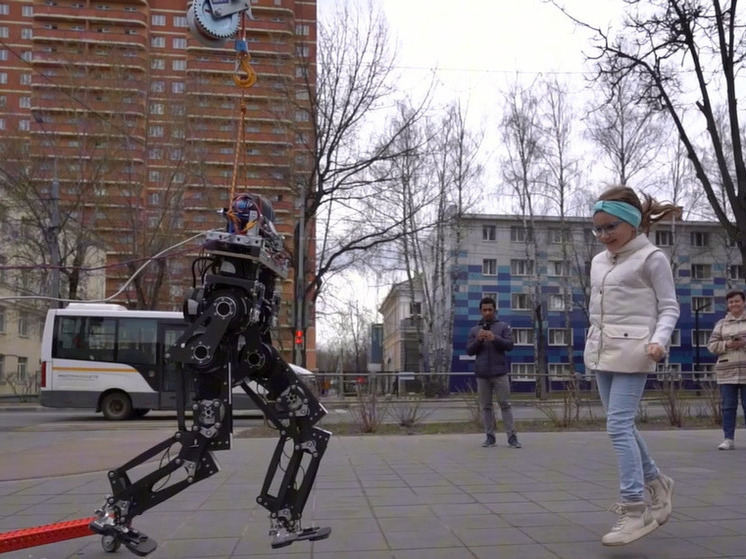
Кроме систем тяги и электроприводов инженеры лаборатории существенно поработали над «стопой» и «щиколоткой» робота. Их выполнили из прочных и легких материалов: углепластика, дюралевых сплавов и деталей, напечатанных на 3D-принтере. Роль коленей у двуногой машины выполняет особая зубчатая передача – механизм по передаче мощности вращением, в котором два подвижных звена являются зубчатыми колёсами. Наделенная специальными тягами, она придает движениям робота не только все степени свободы, характерные для человеческого тела, но и превосходит их.
- Мы еще в процессе разработки, но наши ноги уже могут ходить, быстро разгоняться, сгибать колени и совершать прыжки, сохраняя равновесие при приземлении, – поясняет руководитель направления антропоморфной робототехники МФТИ Егор Давыденко. – По нашей информации, это первый разработанный в РФ антропоморфный робот, способный динамично прыгать.
Оптимизация алгоритмов управления роботом продолжается. В ближайшем будущем ученые представят и более усовершенствованную верхнюю часть робота: торс, верхние конечности и систему манипуляции объектами.
Комментарии